
Automobilgintza garatzeko eta probatzeko gidatzeko simulagailua
Gidariari Laguntzeko Sistema Aurreratuen (ADAS) eta gidatzeko autonomoen teknologien garapena eta probak berebiziko garrantzia dute eboluzio bizkorreko automobilgintzaren industrian. [1]. Hori dela eta, gure aSR eta CADFEM industria-kideekin elkarlanean, ibilgailuen funtzioen garapena eta probak hobetzen dituen gidatzeko simulagailu bat eraiki genuen. Ibilgailuen simulagailuak simulazio-tresna anitzak proba-ingurune bakarrean integratzen direla erakusten du FERAL erabiliz. [2] ko-simulazio esparrua. Batez ere, integrazio honek automobilgintza garatzeko prozesua nabarmen arintzen du. FERAL funtsezkoa da ibilgailu autonomoak bezalako sistema konplexuak garatzeko, garapen denbora murrizteko eta fidagarritasuna hobetzeko. Blog honetan, gure gidatzeko simulagailuaren xehetasun garrantzitsuenak eztabaidatuko ditugu, egungo erronkak aurkeztuko ditugu eta horiek nola gainditu ditugun deskribatuko dugu.
Gidatze-simulatzailea: automobilgintzako ingeniarientzako tresna sofistikatua
FERALen gaitasunak automozio probak egiteko ingurune konplexu batean erakusten dira. Zehazki, Carla Simulator ingurune errealista eta ibilgailuen fisika ereduetarako erabiltzen da. Konfigurazio honek mundu errealeko eszenatokiak gertutik imitatzen ditu, eta, horrela, proba eta baliozkotze birtualetarako oinarri errealista bat eskaintzen du. Gainera, CADFEM-ekin elkarlanean garatutako ADAS eta aSR-k hornitutako gidatzeko simulagailuaren hardwareak proba birtualen esperientzia ahalik eta benetakoena dela ziurtatzen dute. Gainera, simulagailuak ibilgailuen datu erabakigarriak jarraitzeko analitiko panel bat eta puntako infotainment sistema bat ditu, biak FERAL esparruaren bidez integratuta.

1. Irudia. Gidatzeko simulagailuen instalazioak.
Teknologia-osagai integratuak gidatzeko simulagailuan
Gidatzeko simulagailuak hiru osagai nagusi ditu: FERAL, SCADE eta CARLA. Osagai hauek elkarren artean konektatzen dira tresnaren berariazko interfaze-konektoreen bidez. Osagai horietako bakoitzak ezinbesteko zeregina du simulazio-prozesuan.
- FERAL: CAN busean oinarritutako komunikazio-azpiegitura irudikatzen duen simulazio-eredua orkestratzen du. Horrela, seinale eta komando-mezuen gertaeren araberako progresioa kudeatzen du kontuan hartzen den automobil-sistemaren sare birtualean zehar. Era berean, garraiatutako sentsoreen eta aktoreen datuen kodeketa eta deskodeketa kudeatzen ditu, hala nola ibilgailuaren abiadura, aurreko autoaren distantzia eta dagozkion balaztatze- eta throttling-aginduak.
- CARLA: SCADEn inplementatutako ADAS funtzioen diseinuek eskatzen duten ingurumen-sentsoreen datuak eta aktore-aginduak trukatzen dituen trafiko-simulagailu gisa jokatzen du. Gainera, CARLA simulazio-eszenatokien konfigurazioa eta kontrola Python scripten bidez kudeatzen dira, funtsezkoak baitira trafiko-ingurunearen simulazioa zehaztasunez integratzeko.
- GUTXIAGO: ADAS/AD funtsezko funtzioen jokabide-logika diseinatzeko erabiltzen da, hala nola Adaptive Cruise Control (ACC) eta Lane Change and Overtake Assist (LCOA). Gainera, SCADEk diseinu-ereduaren artefaktuetatik eratorritako exekutatu daitekeen kodea automatikoki sortzea ahalbidetzen du.
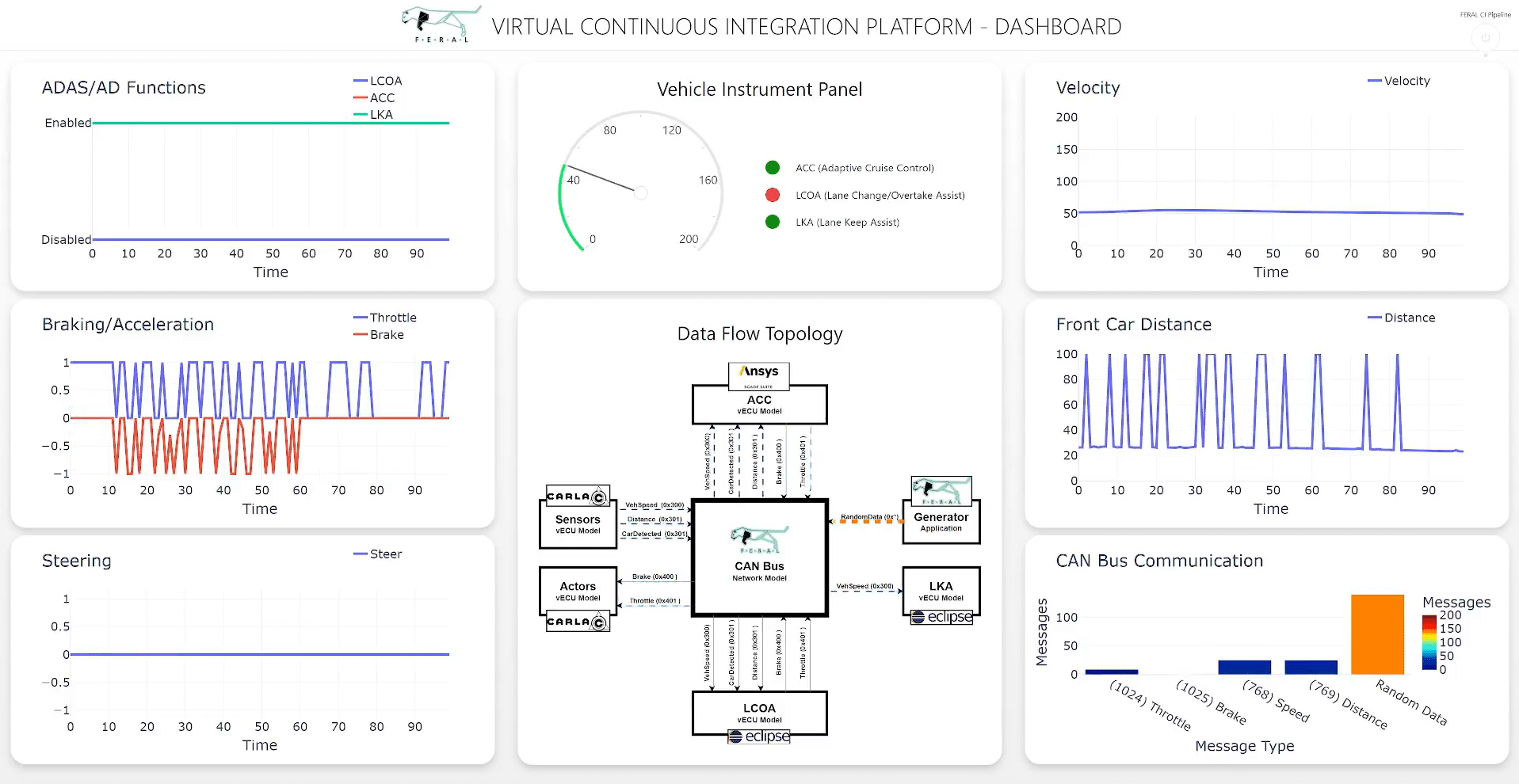
2. irudia. FERAL gidatzeko simulagailuaren aginte-panela. Simulazioa egiteko, egin klik hemen
Simulagailuen garapena gidatzeko erronkak
Gidatzeko simulagailuak ezinbestekoak dira automozio sistema aurreratuak garatzeko eta probatzeko [3, 4]. Hala ere, gidatzeko emuladore errealista eta eraginkorra sortzeak eta mantentzeak hainbat erronka ditu [5, 6]. Hemen, eszenatokien sorkuntzan, ADAS probetan eta akatsen injekzioen funtsezko erronketan sakontzen dugu.
Eszenarioen Sorkuntza
Askotariko eszenatokiak egitea ezinbestekoa da proba sakonak egiteko. Eszenatoki hauek gidatzeko hainbat baldintza eta balizko arriskuak imitatu behar dituzte [7]. Gainera, eszenatokiak gertutik ispilu behar dira mundu errealeko inguruneakeguraldi-baldintza, errepide mota eta trafiko-eredu desberdinak biltzen dituena [8]. Gainera, eskalagarritasuna Eszenatoki ugari sortzea eta kudeatzea, gertaera arraroak eta kasu ertainak barne, funtsezkoa da, baita parametrizazioa Abiadura, trafiko dentsitatea eta oinezkoen portaera bezalako aldagai doigarrietarako beharrezkoa den gaitasuna ADAS baldintza ezberdinetan probatzeko. [9].
ADAS funtzioak probatzea
ADAS funtzioak modu eraginkorrean ebaluatzeko gurutzaldi-kontrol egokitzailea, erreia mantentzeko laguntza, erreia aldatzeko laguntza, larrialdiko balazta-laguntza, etab., ibilgailuaren simulagailuak ingurune kontrolatu eta errealista eman behar du. Horregatik, ibilgailuen dinamika eta sentsoreen sarrerak zehaztasunez eta zehaztasunez errepikatu behar da ADAS erantzun errealistak bermatzeko, bizitza errealeko egoeretan gertatuko liratekeen bezala. Horrez gain, identifikatzea eta probak egitea gidatzeko egoera arraroak baina kritikoak [10]erreproduzigarritasuna eta erreplikagarritasuna funtsezkoak dira ADASen errendimendua balioztatzeko.
Matxura Injekzioa
Erronka da matxurak injekzio teknikak sartzea sistemen sendotasuna eta akatsen tolerantzia ebaluatzeko [11]. Akatsak a batean sartu behar dira modu kontrolatuan behin betiko kaltetu gabe sistema edo proba-ingurunearen segurtasuna arriskuan jartzea. Gainera, estaldura integrala hutsegite puntuak beharrezkoak dira balizko akats guztiak probatzen direla ziurtatzeko. Gainera, sistemaren arkitektura eta litekeena den hutsegite moduak sakon ulertzea eskatzen du. Gainera, sistemaren erantzunak kontrolatzeko eta aztertzeko gaitasuna akatsak denbora errealean derrigorrezkoa da portaera ebaluatzeko eta hobekuntzak ezartzeko.
Gure irtenbidea
Gidatze-simulagailuaren konfigurazioak erronka horiei aurre egiten die ASAM OpenSCENARIO edo ASAM OpenDRIVE bezalako araudi eta estandarrei atxikita dauden eszenatokien sorkuntza sartuz gidatzeko hainbat funtzioren baliozkotze-prozesuetarako. Gure FERAL teknologiak ADAS funtzioekin eta sare-simulazioekin parametriza daitezkeen eszenatokiak akoplatzea ahalbidetzen du, ADAS probak egiten direla ziurtatzeko hainbat egoeratan, gidatzeko eszenatoki kritikoetan barne. Nabarmentzekoa, gaur egun arrakastaz probatutako erabilera kasuak gidatzeko agertokien gaitasunak erabiltzen dituztenak hauek dira:
Erregresio probetan, Adaptive Cruise Control (ACC) sistemaren osagai berri gisa sartzeak ebaluazio sakona eskatzen du onarpen-irizpide zehatzen arabera. Esaterako, sistemak erreiaren osotasuna mantendu behar du autobideko kurbetan 120 km/h-ko abiaduran. ACC desgaituta zein gaituta probatuz gero, informazio kritikoak agerian uzten dira. Zehazki, sistemak ACC gaituta erreiaren osotasuna mantendu ez izanak birdiseinatu eta hobetu behar diren arloak nabarmentzen ditu.
-
Funtzioen Integrazio Probak
Funtzioen integrazioaren probak funtsezkoak dira Gidari Laguntzarako Sistema Aurreratuak (ADAS) elkarrekin funtzionatu behar dutenean. Adibidez, ACC eta Lane Change Assist (LCOA) gaituta daudenean, bi funtzioek baliabide berdinetara sartzen dira eta baliabideen lehiaketa bat gertatzen da. Elkarreragin honen bidez, ibilgailuaren emuladorea errei bereko ibilgailu geldoago batera hurbiltzen denean lehentasunezko manipulazioa nola zehazten den ikusi dugu. Azken finean, probak sistemak LCOA ACC baino lehen lehenesteko duen gaitasuna berresten du, aurreratzeko maniobra arrakastatsuak ahalbidetuz.
Gainera, gure sistemak sare-mailako akatsen injekzioa errazten du simulazioan zehar, automozio-sistemaren ebaluazio sakona eta sendotasuna bermatuz. Gaitasun hori ilustratzeko, a inplementatu dugu matxura injekzio proba. Erabilera-kasu honek hiri-trafikoko eszenatoki bat simulatzen du, non gidatze-simulatzaileak ACC gaituta duen beste auto bat jarraitzen duen. Hemen, probak sistemaren akatsak eragiten ditu exekuzioan zehar CAN buseko datu-trafikoko karga dinamikoki manipulatuz. Ondorioz, agertoki honek ACC funtzioaren sendotasuna ebaluatzen du estres-baldintzetan, hala nola, autobus-pilaketak, datu-transmisio kritikoak atzeratu edo bertan behera uzten dituena, azken finean ibilgailua aurreko autoarekin talka egitea eraginez.
Goiko erabilera kasuen ezarpen zehatza Erref. [12].
Aurrera begira
Gidatzeko simulagailuak funtsezkoak dira automobilgintzaren teknologia aurreratzeko, bereziki ADAS eta ibilgailu autonomoetarako. Eszenatokiak sortzeko, ADAS probak eta akatsen injekzioko erronkak gainditzeko, etengabeko berrikuntza ezinbestekoa da. Gainera, proba-protokolo zorrotzak eta maiz eguneratzeak beharrezkoak dira eboluzionatzen ari diren estandar eta konplexutasunen erritmoa mantentzeko. Esfortzu iraunkorrak erronka hauetan nabigatzen lagunduko digu, eta, horrela, automobilgintzako teknologia aurreratuago eta fidagarriagoak lortzeko bidea irekiko dugu.
Ondorioa: automobilgintzaren teknologiaren etorkizuna moldatzen
FERAL ko-simulazio-esparrua erabiliz, gidatzeko simulagailuak automobilgintzaren garapenean aurrerapen berriak erakusten ditu. Hainbat eredu eta simulazio tresnak integratuz, gidatzeko funtzio autonomoen baliozkotze birtuala eta egiaztapena ahalbidetzen du, baita infotainment sistemak eta konektibitate protokoloak probatzea ere. Gainera, akatsen injekzioa gehitzeak sistemaren sendotasuna bermatzen du, ibilgailu seguru eta fidagarriak garatzeko ezinbesteko tresna bihurtuz. Gure aSR eta CADFEM industria-bazkideen laguntzarekin, simulagailu honek teknologia modernoak ibilgailuen diseinua eta funtzionaltasuna nola hobetu dezakeen erakusten du. Ondorioz, industria eraginkortasun eta berrikuntza handiagorantz bultzatzen du. Automobilgintza garatzeko komunitatea gonbidatzen dugu simulazio-tresna sofistikatu honek automobilgintza-teknologiak aurrera egiteko duen potentziala aztertzera.
Erreferentziak
[1] S. Sonko, CD Daudu, F. Osasona, AM Monebi, EA Etukudoh eta A. Atadoga, “The evolution of embedded systems in automotive industry: A global review,” Mundua J. Adv. Erres. Errev., liburukia. 21, zk. 2, 96–104 or., 2024, doi: 10.30574/wjarr.2024.21.2.0420.
[2] T. Kuhr, T. Forster, T. Braun eta R. Gotzhein, “FERAL — Framework for simulator coupling on requirements and architecture level”, in. 2013 11th ACM/IEEE International Conference on Formal Methods and Models for Codesign (MEMOCODE 2013)2013, 11-22 or.
[3] D. Norfleet, J. Wagner, K. Alexander eta P. Pidgeon, “Automotive Driving Simulators: Research, Education, and Entertainment,” SAE Int. J. Passeng. Autoak – Elektroia. Elektr. Syst., liburukia. 2, ez. 1, 186–193 or., 2009, doi: 10.4271/2009-01-0533.
[4] 2015 IEEE 81. Ibilgailuen Teknologia Konferentzia (VTC Spring): IEEE, 2015.
[5] A. Bachorek eta M. Meiler, Arg., ADAS/AD Funtzioen Diseinuan Ezaugarrien Interakzioak detektatzeko Testbed Birtuala2023.
[6] P. Hock, J. Kraus, F. Babel, M. Walch, E. Rukzio eta M. Baumann, “How to Design Valid Simulator Studies for Investigating User Experience in Automated Driving”, in. Automobilgintzako Erabiltzaileen Interfazeei eta Ibilgailuen Aplikazio Interaktiboei buruzko Nazioarteko X. Konferentziaren aktakToronto ON Kanada, 2018, 105–117 orr.
[7] S. Eguzkia et al., “DriveSceneGen: gidatzeko eszenatoki anitz eta errealistak sortu hutsetik”, IEEE Robota. Kotxea. Bihurtu., liburukia. 9, ez. 8, 7007–7014 or., 2024, doi: 10.1109/LRA.2024.3416792.
[8] J. Dirua et al., “AdvSim: Norbere gidari diren ibilgailuentzako segurtasun-eszenario kritikoak sortzea” atalean IEEE/CVF Konferentziaren Akta Ordenagailuaren Ikusmenari eta Ereduen Aitorpenari buruzkoa (CVPR)2021, 9909–9918 orr.
[9] Y. Abeysirigoonawardena, F. Shkurti eta G. Dudek, “Generating Adversarial Driving Scenarios in High-Fidelity Simulators”, urtean 2019ko Robotika eta Automatizazioari buruzko Nazioarteko Konferentzia (ICRA), Montreal, QC, Kanada, uuuu-uuuu, orr. 8271–8277.
[10] S. Wagner, A. Knoll, K. Groh, T. Kühbeck, D. Watzenig eta L. Eckstein, “Virtual Assessment of Automated Driving: Methodology, Challenges, and Lessons Learned,” SAE Intl. J CAV, liburukia. 2, ez. 2019ko 4a, doi: 10.4271/12-02-04-0020.
[11] M. Le eta Y. Tamir, “Fault Injection in Virtualized Systems-Challenges and Applications,” IEEE Trans. Konputagailu fidagarria eta segurua., liburukia. 12, zk. 3, 284–297 or., 2015, doi: 10.1109/TDSC.2014.2334300.
[12] P. Baumann, R. Samlaus, L. Mikelsons, T. Kuhn eta J. Jahic, “Towards virtual validation of distributed functions”, in 2019ko Udako Simulazio Jardunaldiaren aktak2019.
Related Posts

Microsoft AutoAdminLogon knacken und Admin Center rückgängig machen (27. Juli 2026) Borns IT- und Windows-Blog

Batteriehersteller Varta reicht mehrere Insolvenzanträge ein (24. Juli 2026) Borns IT- und Windows-Blog
